


As a Global Manufacturer of Bevel Gears

The standard definition of a Bevel Gear is a cone-shaped gear which transmits power between 2 intersecting axels.
Looking at bevel gears from the differences in helix angles, they can be generally classified into straight bevel gears, which do not have helix angles, and spiral bevel gears (including zerol bevel gears), which do have helix angles. However, because of the fact that manufacture facilities for straight bevel gears are becoming rare and the fact that straight bevel gears teeth cannot be polished, making spiral bevel gears which can be polished superior in terms of noise reduction, spiral bevel gears are likely to become more common in the future.
Bevel gears can be generally classified by their manufacturing methods, namely the Gleason method and Klingelnberg method, which each have differing teeth shapes, and presently most gears use the Gleason method. Incidentally, all gears manufactured by KHK use the Gleason method.
Furthermore, there are also variations in gears in terms of teeth pitch (modules, etc.), whether polished or not, and materials used. For example in the case of materials, S45C of machine structural carbon steel, SCM415 of machine structual alloy steel and MC901 of engineering plastic, etc. are often used, and duracon, etc. are used for plastic molded parts.
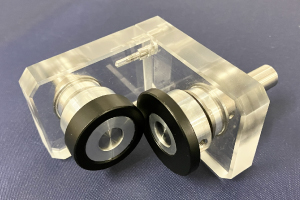

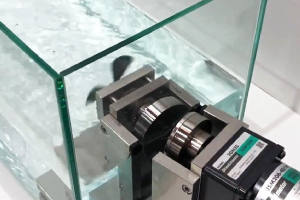
Clean, Quiet, and Safe Motion — Powered by Non-Contact Technology
- No particle generation from tooth surface wear
- Operates without the need for Lubrication
- Barrier transmission allows for seal-less designs
- Low noise and vibration due to non-contact power transmission
- Easier assembly with high angular and eccentric misalignment tolerance
- Magnetic slip under overload enhances safety conditions
See Applications & Benefits (PDF)

With this technical data you can view comprehensive information regarding KHK gears such as their features and advice and warnings when selecting and using them.

MHP
High-Ratio Hypoid Gears
Module : 1 – 1.5
Speed ratio : 15 – 60
Material : SCM415
Hardening : Carburizing NOTE 1
Tooth finish : Cut (non-ground)
Grade : JIS 3
Hypoid gears that have been tempered and hardened that are capable of rapid deceleration.
Click Here to Select Bevel Gears
MBSG
Ground Spiral Bevel Gears
Module : 2 – 4
Speed ratio : 2
Material : SCM415
Hardening : Carburizing NOTE 1
Tooth finish : Ground teeth
Grade : JIS 1
Gears that have been hardened and ground that has excellent accuracy, strength and abrasion resistance. Secondary operations are possible except for the teeth.
Click Here to Select Bevel Gears
SBSG
Ground Spiral Bevel Gears
Module : 2 – 4
Speed ratio : 1.5 – 3
Material : S45C
Hardening : Gear teeth induction hardened
Tooth finish : Ground teeth
Grade : JIS 2
Gears that has been hardened and ground with a good balance of accuracy, wear resistance and cost. Secondary operations are possible except for the teeth.
Click Here to Select Bevel Gears
MBSA / MBSB
Finished Bore Spiral Bevel Gears
Module : 2 – 6
Speed ratio : 1.5 – 3
Material : SCM415
Hardening : Overall carburizing
Tooth finish : Cut (non-ground)
Grade : JIS 4
Gears that have been fully hardened that have excellent strength and wear resistance. Can be used in the finished shape.
Click Here to Select Bevel Gears
SBS
Spiral Bevel Gears
Module : 1 – 5
Speed ratio : 1.5 – 4
Material : S45C
Hardening : Gear teeth induction hardened
Tooth finish : Cut (non-ground)
Grade : JIS 4
Gears that have been hardened with excellent wear resistance. Secondary operations are possible except for the teeth.
Click Here to Select Bevel Gears
SB / SBY
Steel Bevel Gears
Module : 1 – 8
Speed ratio : 1.5 – 4
Material : S45C
Hardening : Please see details on PDF
Tooth finish : Cut (non-ground)
Grade : JIS 3
Many lineups are available at a low price. The teeth can be additionally hardened.
Click Here to Select Bevel Gears
SB
Steel Bevel Gears & Pinion Shafts
Module : 1.5 – 3
Speed ratio : 5
Material : S45C
Hardening : Please see details on PDF
Tooth finish : Cut (non-ground)
Grade : JIS 3
The teeth can be additionally hardened.
Click Here to Select Bevel Gears
SUB
Stainless Steel Bevel Gears
Module : 1.5 – 3
Speed ratio : 1.5 – 3
Material : SUS303
Hardening : None
Tooth finish : Cut (non-ground)
Grade : JIS 3
Stainless steel gears with rust resistance.
Click Here to Select Bevel Gears
PB
Plastic Bevel Gears
Module : 1 – 2
Speed ratio : 1.5 – 3
Material : MC901
Hardening : None
Tooth finish : Cut (non-ground)
Grade : JIS 4 equivalent
Nylon gears can be used with no lubrication.
Click Here to Select Bevel Gears
DB
Injection Molded Bevel Gears
Module : 0.5 – 1
Speed ratio : 2
Material : Duracon (R) (M90-44) NOTE 2
Hardening : None
Tooth finish : Injection molded
Grade : JIS 6
Low-priced gears made through injection molding. Suitable for light loads.
Click Here to Select Bevel Gears
BB
Sintered Metal Bushings

Nissei KSP
Ground Spiral Bevel Gears
Module : 1.5 – 6
Speed ratio : 1 - 2
Material : SCM415 (SCM420)
Hardening : Carburizing NOTE 1
Tooth finish : Ground teeth
Grade : JIS 0
Gears that have been hardened and ground that has grade-0 accuracy, strength, abrasion resistance and quietness. Secondary operations can be given except for the teeth.
Click Here to Select Bevel Gears
[NOTE 1] Although these are carburized products, secondary operations can be performed as the bore and the hub portions are masked during the carburization. However, note that high hardness (HRC40 at maximum) occurs in some cases.
[NOTE 2] "Duracon (R)" is a registered trademark of Polyplastics Co., Ltd. in Japan as well as other countries.
Spiral and Straight Bevel Gears for machine designers
This article is reproduced with the permission.
Masao Kubota, Haguruma Nyumon, Tokyo : Ohmsha, Ltd., 1963.

The gears used when two shafts intersect are based on two cones in rolling contact with apexes meeting at the point of intersection of the two axes and having teeth at the same distance from the apexes. These are called bevel gears. Above mentioned cones are called pitch cones and their half peak angles are called pitch cone angles.

Figure 8.1 Pitch Angles of Bevel Gears
In Figure 8.1, assume the shaft angle to be Σ, the respective numbers of teeth zi (i = 1, 2 ), angular speed ωi, and pitch cone angle (or simply pitch angle) ɣ0i , then consider the rotating speed of a point on the common contact line of the cones at distance K from the apex :
ω1 K sin ɣ01= ω2 K sin ɣ02
ɣ01 + ɣ02 = Σ, angular speed ratio ω1/ω2 = z2/z1
Therefore,
tan ɣ01 = sin Σ / [(z2/z1) + cos Σ ] , tan ɣ02 = sin Σ / [(z1/z2) + cos Σ ]
Normally, Σ = 90° so that :
tan ɣ01 = z1/z2, tan ɣ02 = z2/z1 and ɣ01 + ɣ02 = 90°
In particular, when ɣ01 + ɣ02 = 45°, the bevel gear is called a miter gear. Furthermore, when Σ ≠ 90°, as shown in Figure 8.2, it is called an angle gear.

Figure 8.2 Angle Gear
When the large gear has a pitch angle of 90°, it is called a crown gear. It is equivalent to a rack in spur gear and becomes the base for tooth form and tooth cutting.
Bevel gears are divided into straight bevel gears and spiral bevel gears based on their tooth lines at the pitch cone. Conical gears and face gears can also be considered as belonging to the spiral bevel gear group. Because they are not based on a pitch cone and rely on a specialized tooth cutting method however, they are discussed separately from spiral bevel gears.
Efficiency of Bevel Gear
Because most bevel gears are intersecting shaft gears, their mesh is almost always rolling contact, therefore their general efficiency is high, typically 98-99%.
Straight Bevel Gears

Bevel gears are cone shaped gears which transmit motion between two intersecting shafts. Straight bevel gears are the simplest of these bevel gears with their teeth being straight and pointing toward the apex of the cone. They are easier than spiral bevel gears to make and do not produce inward thrust (in the minus direction), simplifying bearing construction. On the other hand, they have the disadvantage of not being able to grind teeth after heat treatment.
Straight bevel gears are divided into two groups: profile shifted Gleason type and non-profile shifted ones called standard type or Klingelnberg type. Over all, the Gleason system is presently the most widely used. In addition, the Gleason Company’s adoption of the tooth crowning method called Coniflex gears produces gears that tolerate slight assembly errors or shifting due to load and increases safety by eliminating stress concentration on the edges of the teeth.
Straight bevel gears are generally used in relatively slow speed applications (less than 2m/s circumferential speed). They are often not used when it is necessary to transmit large forces. Generally they are utilized in machine tool equipment, printing machines and differentials.
Spiral Bevel Gears

Bevel gears are cone shaped gears which transmit motion between two intersecting shafts. Spiral bevel gears are one type in which the teeth are curved spirally. Unlike straight bevel gears, these teeth contact each other gradually and smoothly from one end to the other. The meshing of teeth are, as in straight bevel gears, rolling contacts on the pitch cone surface.
With regard to design and gear cutting, just as in straight bevel gears, the Gleason type is most widely used in spiral bevel gears. However, in Germany, the Klingelnberg type with equal toe and heel tooth depth is still deeply rooted in use.
Spiral bevel gears have the advantage of being able to grind teeth after heat treatment, making it possible to produce high precision gears. Also, because the teeth contact ratio is higher than with straight bevel gears, noise and vibration are reduced and they are better suited for high speed applications. For example, noise and vibration are markedly reduced at high operating speed (more than 10m/s). They are also stronger and more durable than straight bevel gears allowing for higher load operations. On the other hand, it is more difficult to manufacture
spiral bevel gears and needs attention regarding change in thrust directions depending on the rotation and twist angle. These are some of the disadvantages.
In use, the right-hand spiral is mated with the left-hand spiral. As for their applications, they are frequently used in automotive speed reducers and machine tools.
Tooth Shape of Spiral Bevel Gears
This article is reproduced with the permission.
Masao Kubota, Haguruma Nyumon, Tokyo : Ohmsha, Ltd., 1963.
Spiral bevel gears are gears that have the teeth arranged on a pitch cone along curved lines which produces a quiet operation even at high speed. Especially when the peripheral velocity exceeds 5 m/s, it is difficult to achieve a quiet operation and use of spiral bevel gears are considered desirable.

(a) Straight / (b) Circular Arc / (c) Involute
Figure 8.13 Types of Spiral Bevel Gears (Tooth Lines of Crown Gear)
The tooth form line is determined based on the standard crown gear tooth form (the intersection of the crown tooth surface and pitch surface). If this is considered as the logarithmic swirling line, the tilt angle of the tooth form is constant regardless of the radius which is most desirable from a tooth meshing consideration. However, for tooth cutting, it is not convenient and several curves more suitable for cutting are in actual use. As shown in Figure 8.13, these are tilted straight line (Reinecker form) [these are sometimes called helical bevel gears], circular arc (Gleason form), and involute (Klingelnberg form). Besides these, there are trochoid (Oerlikon form, Fiat form) and Archimedes spiral, etc.
In particular, as shown in Figure 8.14, when the tooth form is a circular arc and at the midpoint of the tooth form, the tilt angle is 0 is called Zerol gear. While the loading of the Zerol tooth is similar to the straight tooth, the meshing is smoother. All the circular arc gears other than Zerol gears are sometimes called helical bevel gears.

Figure 8.14 Zerol Bevel Gear
At the point on the tooth line where it intersects the pitch cone generating line at angle β, if the perpendicular cross section is drawn, then the equivalent spur gear’s number of teeth zvi is
z vi = zi / cos ϓ 0i cos 3 β
and the normal to tooth surface pressure angle αn relates to the spherical surface pressure angle αs as
tan αs = tan αn / cos β
The twist direction of the teeth is, when looking from the small end of the teeth, if the teeth curve clockwise, it is a right spiral and if the teeth curve counterclockwise, it is a left spiral. For mating curved bevel gears, if one gear is right spiral, the opposite gear is left spiral.
Conical gear
This article is reproduced with the permission.
Masao Kubota, Haguruma Nyumon, Tokyo : Ohmsha, Ltd., 1963.
The combination of helical racks which move straightly using crown gears, or cone shape gears guided through helical rack are called conical gear. Each gear is thought to be similar to helical gear in pic 8.27, whose addendum modification changes are oriented in the axial direction. It makes point-contact where contact lines of the mediating rack and each gear cross. Conical gearing is sometimes used instead of bevel gearing when the load is small because they can be cut by modified hob machinery or gear shavers, or by attaching auxiliary equipment. In case of parallel axes, it becomes a conical shifted gear (see p.93) and makes point-contact.

Pic 8.27 Conical gear
1) Cut edge of tooth by pitch cylinder
Assembly and tooth contact of bevel gear
Important points for assembling bevel gear
Important points for assembling bevel gear are :
- Backlash Backlash is needed to absorb manufacturing error and secure thickness of oil film on gear surface.
- Tooth contact
- Tooth contact of bevel gear is influenced by shaft angle error, shaft axis error, and mounting distance error.
- Backlash adjustment also changes tooth contact because mounting distance changes.
Tolerance of gear box for bevel gear
| 1 | Shaft angle tolerance | +2' - 0 |
|---|---|---|
| 2 | Shaft misalignment | ±0.025 |
| 3 | Mounting distance | ±0.025 |
| 4 | Mount reference surface runout | 0.025 or less |
| 5 | Mount cylindrical surface runout | 0.025 or less |
Tolerances shown above are commonly expected values and can be referred as a rough guide.
Technical terms for tooth contacts

- Peak
- Bottom
- Inner end
- Outer end
- Tooth trace direction
- Tooth depth
Tooth contact of bevel gear 1
Prevent strong edge contact along tooth trace direction within 10% of tooth trace length from both edges of tooth trace


- Inner end
- Outer end
- Strong edge contact is NG
- Strong edge contact is NG
Tooth contact of bevel gear 2
Prevent strong contact along tooth depth near peak or bottom of gear tooth


- Inner end
- Outer end
- Strong peak contact is NG
- Strong bottom contact is NG
Tooth contact of bevel gear 3
Tooth contact should include the center of working depth

- Inner end
- Outer end
- Position near the inner end is better
Assembling error and tooth contact of gear
- Assembling error of gear appears on tooth contact
- Tooth contact near the inner end is preferable as shown right
- How assembling error influences tooth contact is shown below

- Inner end
- Outer end
Tooth contact with mounting distance error


When adjusting backlash with mounting distance, tooth contact deteriorates if you move only one gear
Tooth contact with offset error (shaft misalignment)
When there is shaft axis error (offset error or shaft misalignment), tooth contact becomes diagonal
Tooth contact with shaft angle error


Tooth contact when load is applied
As every gear has pressure angle, the force going away from another gear acts when load is applied. This force then elastically deforms shaft, gear box, bearing and eventually deteriorates tooth contact when load is applied.

Tooth contact change according to load 1

1. Bring tooth contact near inner side when no load

2. When load is applied, tooth contact moves towards outer end because of shaft flexure. Tooth contact becomes large as tooth surface is elastically deformed.
Tooth contact change according to load 2


When load is applied, shaft angle error and offset error occur simultaneously because of shaft flexure
Tooth contact of bevel gear and shaft rigidity
- If gear is moved by hand smoothly during unloading but generates noise and vibration while operating, tooth contact may be deteriorated because of lack of rigidity of inside gear box
- Only assembling distance error can be adjusted by assembling. However, offset error and shaft angle error depend on manufacture error and rigidity of gear box, therefore improving rigidity in design phase is necessary
- One gear becomes single side support and tooth contact may get deteriorated when load is applied
Design to improve shaft rigidity
If rigidity of shaft is low, tooth contact is prone to deteriorate when load is applied even if tooth contact is good when assembled


1. Thick shaft / both sides support / projected part from bearing is short
How to check tooth contact
- Thinly apply red lead or such on tooth surface
- Revolve gear and check location of red lead transferred into the other gear

How to check backlash
- Lock one gear
- Put dial gauge on tooth surface of another gear
- Move the latter gear and read value on dial gauge

Tooth contact of gear
- Tooth contact standard set by Japan Gear Manufacturers Association (JGMA): JGMA1002-01(2003)
- This standard describes ratio, distribution, accuracy, measuring methods and recording techniques, using JIS B 1704:1977 (gear tooth contact) and ISO/TR10064-4:1998 as reference
Related links :
锥齿轮
Types of Gears - A detailed description of Types of Gears
Miter Gears - A detailed description of miter gears
Zerol Bevel Gears - A detailed description of zerol bevel gears
Hypoid Gears - A detailed description of hypoid gears
Equivalent tables of each standard relating to raw materials and precision grades of gears
Ground Gears